基于人机协作状态的新型触觉接管方法
论文相关信息
本文内容取自[1]。
研究背景与意义
在人工智能技术飞速发展的当下,自动驾驶汽车取得了显著进展。但受技术和法规限制,目前道路上大部分自动驾驶汽车处于 SAE 定义的 2 级和 3 级水平,这意味着人类驾驶员仍需留在控制回路中,当高级驾驶辅助系统(ADAS)必要时,会将控制权交还给驾驶员。
然而,驾驶员在监督过程中容易分心、注意力转移,或是去做与驾驶无关的事,这会导致他们对周围环境的感知能力(即态势感知,SA)下降,严重影响接管的安全性。即便驾驶员认真监督,突然的接管要求也可能让他们做出急促、不当的操作,使车辆不稳定,影响后续手动驾驶。目前常见的商业策略是,一旦发出干预请求(RTI),就要求驾驶员立即接管,哪怕驾驶员的态势感知能力很低,这显然不够安全。
为了解决这些问题,以往研究提出了各种方法。有的把接管过程当作优化问题,有的考虑了人类扭矩对控制转移的影响,还有的探索不同协作状态并调整参数来实现平稳过渡(missing reference)。但以往研究大多只关注车辆的横向控制,并且在处理人机偏好冲突方面存在不足,难以实现真正平稳的控制过渡。
在这样的背景下,本文提出了一种基于人机协作状态的新型触觉接管方法,通过动态调整控制权,保障接管过程的平稳和安全,无论是在人机和谐还是冲突的情况下都能发挥作用,并且兼顾了车辆的横向和纵向控制,进一步提升了安全性。
本文工作
为了实现安全平稳的接管,本文从多个方面展开工作,全文方法框架如图1。在评估驾驶员对驾驶环境的感知能力(态势感知,SA)时,将认知状态和肌肉状态作为关键指标。认知状态反映了驾驶员对周围环境的理解程度,过高或过低的认知负荷都不利于驾驶。研究发现,当驾驶员的认知负荷处于适中水平时,他们对路况的判断和应对能力最佳。
同时,以往研究在评估肌肉状态时存在缺陷,忽略了驾驶员接管瞬间紧张导致的扭矩异常问题。本文则引入扭矩阈值的概念,当驾驶员施加在方向盘上的扭矩超过这个阈值时,对肌肉状态的评估会相应调整。同时,车速不同,合适的扭矩也不同,车速越高,所需的转向角度和扭矩越小。因此,本文设计了随车速变化的扭矩阈值,以此更精准地评估肌肉状态。
在设计人机交互环节,本文采用 2 自由度线性时变自行车模型来描述车辆的运动状态,并使用模型预测控制算法作为控制器。为了让驾驶员在接管前后都能自然地感受车辆控制,研究采用了触觉共享控制技术。简单来说,最终控制车辆的指令是驾驶员和 ADAS 输入的结合,通过调整控制权分配系数,决定驾驶员和 ADAS 在控制中的主导程度。
另外,研究还引入了人机意图相似性评估方法。通过综合考虑驾驶员和 ADAS 施加的扭矩大小、方向,以及方向盘实际位置和预期位置的差异,判断人机协作的状态。根据这些评估结果,人机协作状态被分为四类:
- 状态 I:人机意图相似,驾驶员态势感知高,此时只需平稳过渡控制权。
- 状态 II:人机意图相似,但驾驶员态势感知低,除了平稳过渡横向控制权,车辆还会适当减速,给驾驶员更多反应时间。
- 状态 III:人机存在冲突,不过驾驶员态势感知高,此时应快速将控制权交还给驾驶员,减少 ADAS 的干扰。
- 状态 IV:人机冲突且驾驶员态势感知低,这是最危险的情况,此时要立刻停止横向控制权转移,并让车辆减速,保障安全。
在整个接管过程中,协调器实时监测并评估人机协作状态,根据不同状态及时调整控制策略以及驾驶权限分配。
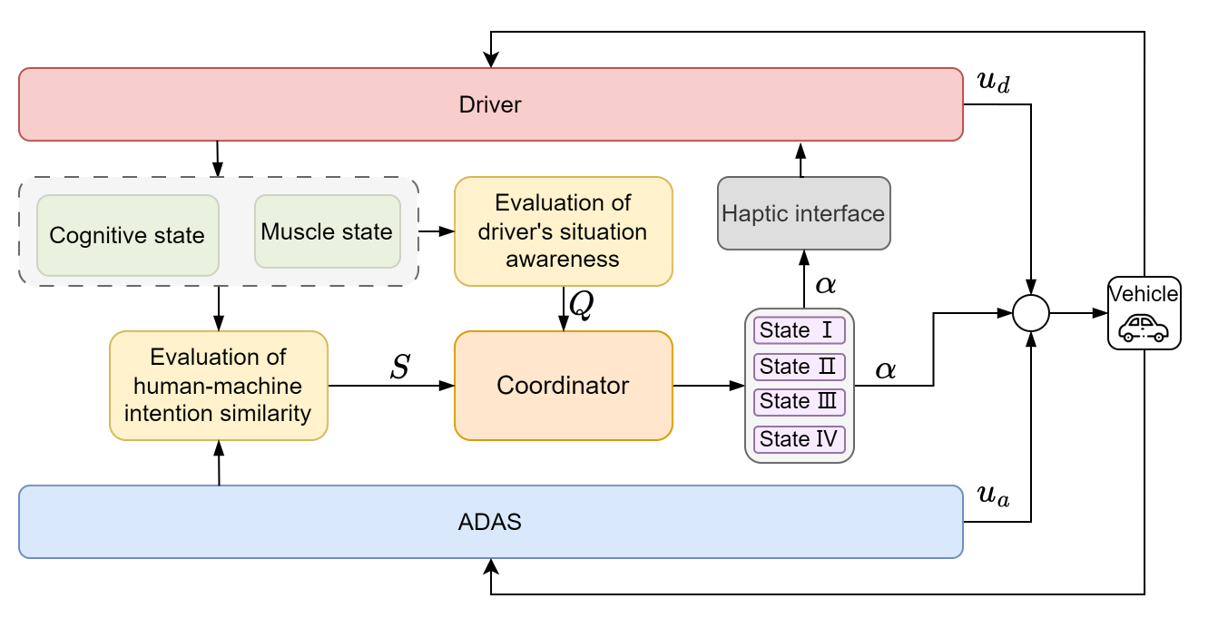
图1 方法框架图
实验结果
实验方面,使用CARLA 模拟器,选择大曲率弯道作为实验场景。5 名有驾驶经验的参与者,通过专业方向盘与模拟环境互动。
实验结果显示,本文方法优势明显。采用本文方法的实验仅出现 1 起事故,而切换方法导致了 5 起事故。在切换方法的测试中,事故常发生在接管请求发出瞬间,驾驶员可能因紧张而猛打方向盘;或者在控制权刚交回时,驾驶员操作不当引发事故,部分实验轨迹如图2。
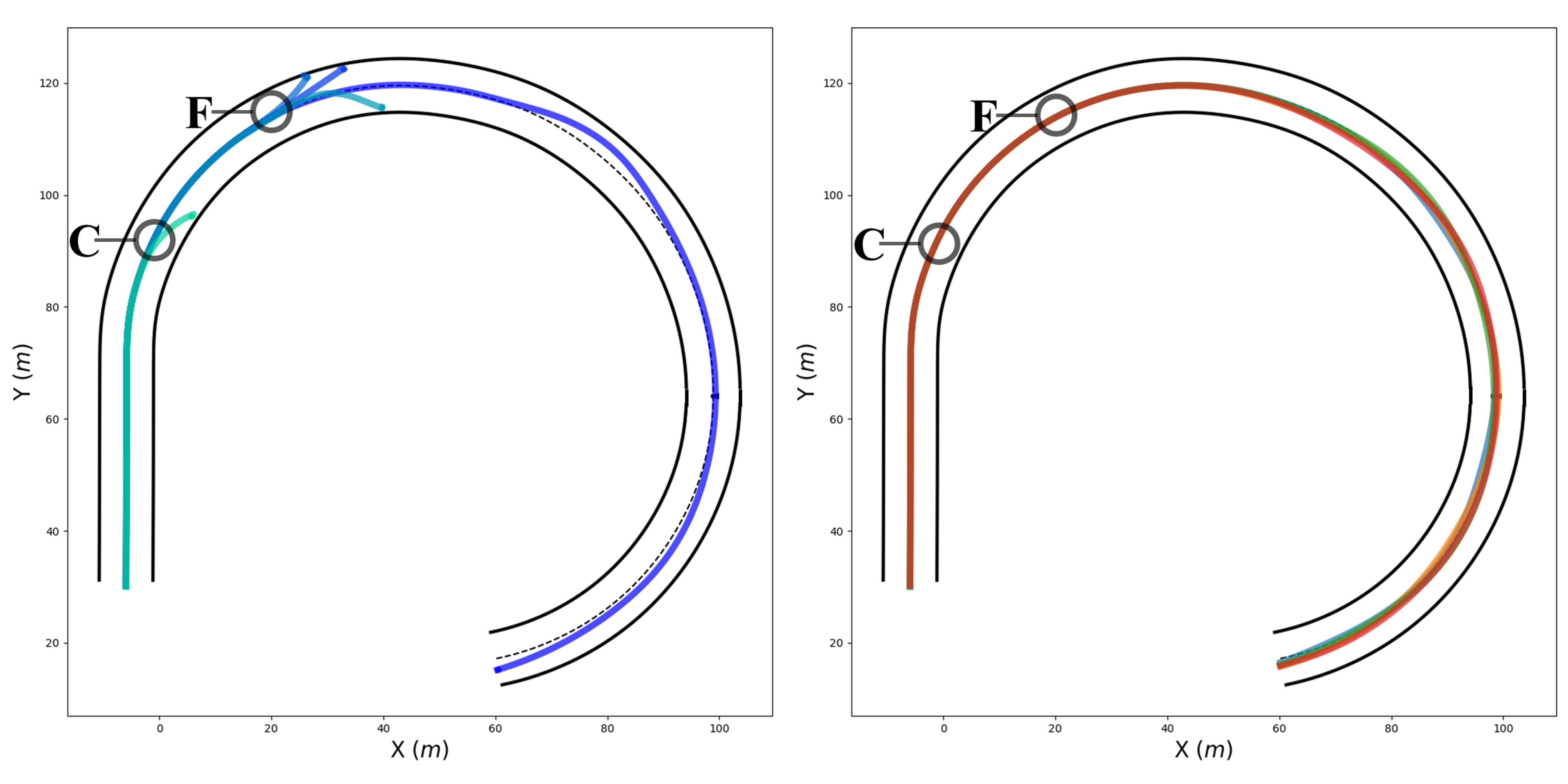
图2 部分实验轨迹图
本文方法在人机冲突时能有效保障安全。当驾驶员因紧张操作失误时,系统会通过反向扭矩提示驾驶员,同时调整控制权分配,让车辆转向更接近 ADAS 的规划,并且降低车速。在系统提示下,驾驶员逐渐恢复情景感知,调整操作,车辆控制权也平稳过渡到驾驶员手中,整个接管过程大约 6 秒,接管过程各项指标的细节如图3。
在人机协作和谐的情况下,本文方法表现更出色。接管请求发出后,驾驶员在系统辅助下轻松操作方向盘,控制权平稳转移,车速变化小。随着驾驶员对车辆状态的感知提升,控制权顺利完成交接,整个过程仅需约 4 秒。
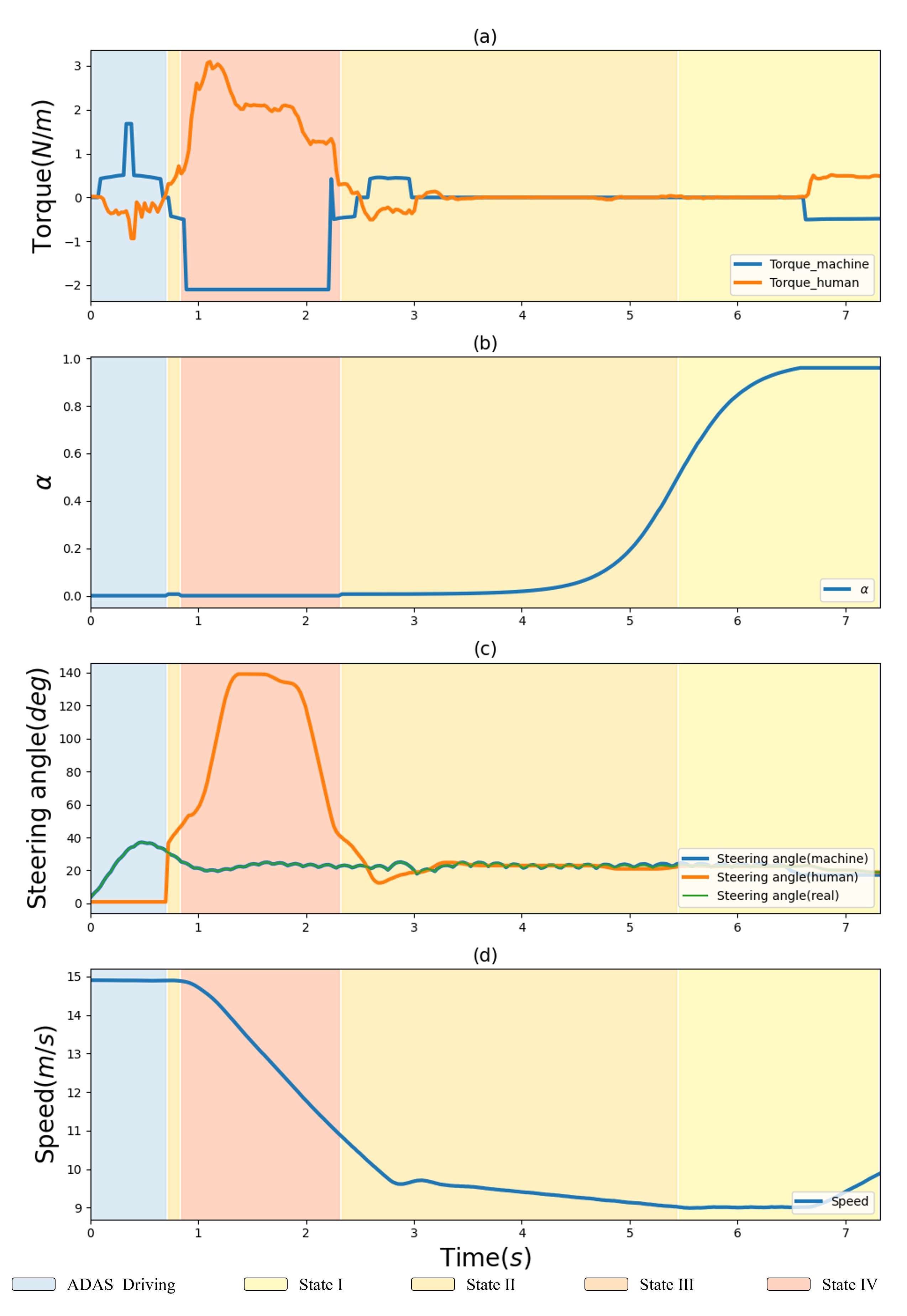
图3 冲突情况下的接管过程的各项指标细节
总结和展望
本文提出的新型触觉接管方法,通过创新的设计和策略,有效解决了自动驾驶接管过程中的难题。无论是处理人机冲突,还是在和谐协作场景下,都能实现安全、平稳的控制权转移。本文的工作集中于控制层的融合,在未来可以考虑规划层的人机意图融合,进一步降低人机冲突,增加灵活性,进一步保障驾驶安全。
参考文献
- [1]Y. Zhao, Z. Xie, C. Xu, X. Liang, R. Xia, and J. Li, “A Novel Haptic Takeover Method Based on Human-Machine Collaboration States,” in 2024 14th Asian Control Conference (ASCC), 2024, pp. 362–367.