人机共享控制中的非线性仲裁方法研究
研究背景与意义
随着人机协作技术的不断发展,共享控制成为新型人机系统实现高效协同的重要核心技术[1]。共享控制通过整合人类与机器的优势实现决策效率的优化和系统性能的提升[2]。在这一框架中,机器依托AI技术具备强大的计算能力和实时分析能力,能够应对复杂环境中的智能任务;而人类凭借直觉判断、经验知识和灵活适应性,为系统提供了不可替代的指导。两者的协同作用,使共享控制在军事、交通、医疗等高要求场景中展现了显著的应用价值,推动复杂任务的高效完成和系统性能的全面优化。
尽管共享控制技术展现了巨大的潜力,其实际应用仍面临挑战[3]。首先,现有AI算法虽然提供了高度自主的决策能力,但由于算法结果的不确定性和不可预测性,在人机协作中引入了较高的动态适应难度。其次,人类与机器在智能特点、决策逻辑和操作方式上的异质性差异,成为实现高效协同的主要瓶颈。这种差异在涉及高维动作空间或动态环境适配时尤为显著,直接影响了人机系统的性能和可靠性。为突破这些挑战,必须开发更具适应性和鲁棒性的人机共享控制技术。
仲裁机制作为共享控制的核心支柱,通过动态协调人类与机器的控制贡献,确保两者在任务执行中的高效协同[4]。仲裁机制的设计目标是实现人类智能与机器智能的深度融合,平衡两者的控制权分配,避免冲突或冗余操作,同时提升系统的实时性和任务适应能力。在设计仲裁机制时,仲裁需要能够快速响应环境变化,确保仲裁结果的即时生效;在噪声和不确定性存在时保持稳定性,提升系统的鲁棒性;同时综合任务需求动态调整人机控制的分配比例,以实现优化目标。
仲裁机制的优化是实现高效共享控制的关键路径。未来的发展方向包括增强仲裁决策的可靠性、提升控制权分配的精细化程度,以及在多任务、多场景中验证仲裁机制的通用性。同时,需进一步探索如何进一步优化仲裁的智能化水平,确保在高风险场景下的安全性与可靠性。
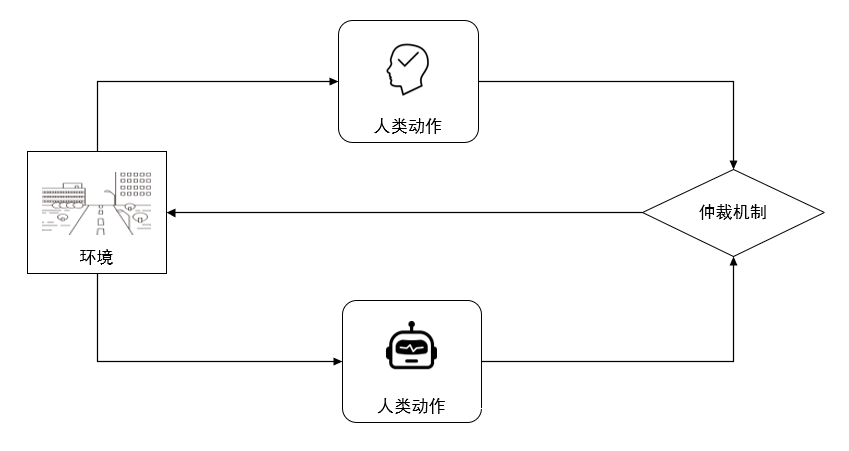
图1 人机仲裁图示
研究现状
随着人工智能技术的快速发展,机器智能水平实现了显著跃升,但现有的共享控制研究多集中于传统人机系统,尚未充分考虑这一跃升所带来的新需求。共享控制作为人机协作的重要技术手段,强调人类与机器共同分担系统控制权,通过融合双方的优势提升协作效率和系统性能。尽管相关研究已经初步建立了一定的理论基础[5][6],例如[2]提出共享控制的一般定义和设计原则,讨论了仲裁机制、意图检测与反馈在系统中的作用,但这些方法在面对复杂动态环境中的智能机器时,难以充分发挥其潜力。特别是在任务复杂性和环境动态性不断提升的背景下,现有方法对智能机器高效决策能力的支持不足,制约了共享控制技术的进一步发展。
共享控制的关键环节是仲裁机制,其主要作用是调节人类与机器的互动强度与合作深度,以实现系统的最优协同[7]。现有仲裁设计多基于线性仲裁框架,在实践中主要通过简单的加权方式或参数调节方法实现。常见的设计方法包括基于任务区域的动态分段调整和利用指数函数的平滑参数调节[8][9]。这些方法在一定程度上解决了任务场景中的基础协作需求,但存在明显的局限性。例如,线性仲裁难以应对复杂动态任务中非线性交互的需求,同时可能因调节方式的限制导致控制权分配的跳跃或冗余问题。这表明为了进一步提升仲裁机制的能力,需要深入研究更复杂的非线性设计框架。
展望
非线性仲裁作为人机协同控制领域的重要研究方向,旨在通过适应性更强的动态调节机制,实现人类与机器在复杂环境中的高效协作和决策。与传统线性仲裁相比,非线性仲裁能够更灵活地应对动态环境中的多样化需求。未来的研究可以从以下几个方面进一步深入:
- 动态权重分配的优化:研究在不同任务阶段如何动态调整人类和机器的控制权权重,避免因单一规则导致的权重分配不合理问题。
- 多因素耦合的整合:深入研究影响仲裁决策的多因素耦合效应,将环境不确定性、任务优先级、操作延迟等关键因素纳入系统设计与分析中。通过系统性地考虑这些因素,构建更加全面的仲裁模型,以增强仲裁机制在复杂动态环境中的鲁棒性和适应性。
- 重要人机关系的融合:研究在非线性仲裁设计下,人机自主性与人机信任在协同系统中的协调作用,探索两者的动态平衡机制。在保障任务效率的同时,通过构建信任调节模型与自主性边界优化方法,实现高效、安全的人机融合协作。
- 高效交互界面的开发:开发可视化程度更高的人机交互界面,使系统能够实时传达仲裁决策的逻辑与依据,提升使用体验与安全性。
- 非线性控制算法的验证:通过真实场景的仿真实验,验证非线性仲裁在复杂任务中的优越性,并分析其在不同场景下的适应性与极限性能。
通过以上研究方向的深入探索,非线性仲裁机制有望成为实现高效人机协作的关键技术,为复杂动态场景下的人机共享控制提供更强大的技术支撑。
参考文献
- [1]Q. Q. Zhang, Y.-B. Zhao, W. J. Lv, and others, “Shared control with optimized arbitration for human-machine sequential decision-making (in Chinese),” Science in China: Information Sciences, vol. 53, pp. 1768–1783, 2023.
- [2]S. Ansari, F. Naghdy, and H. Du, “Human-Machine Shared Driving: Challenges and Future Directions,” IEEE Transactions on Intelligent Vehicles, vol. 7, no. 3, pp. 499–519, Sep. 2022.
- [3]F. Flemisch, D. A. Abbink, M. Itoh, and others, “Joining the blunt and the pointy end of the spear: towards a common framework of joint action, human–machine cooperation, cooperative guidance and control, shared, traded and supervisory control,” Cognitive Technology Work, vol. 21, pp. 555–568, 2019.
- [4]D. A. Abbink et al., “A topology of shared control systems—Finding common ground in diversity,” IEEE Transactions on Human-Machine Systems, vol. 48, no. 5, pp. 509–525, 2018.
- [5]L. Fridman, “Human-Centered Autonomous Vehicle Systems: Principles of Effective Shared Autonomy,” arXiv, 2018.
- [6]S. Javdani, H. Admoni, S. Pellegrinelli, S. S. Srinivasa, and J. A. Bagnell, “Shared autonomy via hindsight optimization for teleoperation and teaming,” The International Journal of Robotics Research, vol. 37, pp. 717–742, 2017.
- [7]J. Jiang and A. Astolfi, “Shared-control for a rear-wheel drive car: Dynamic environments and disturbance rejection,” IEEE Transactions on Human-Machine Systems, vol. 47, no. 5, pp. 723–734, 2017.
- [8]W. Wang, J. Xi, C. Liu, and X. Li, “Human-centered feed-forward control of a vehicle steering system based on a driver’s path-following characteristics,” IEEE Transactions on Intelligent Transportation Systems, vol. 18, no. 6, pp. 1440–1453, 2017.
- [9]J. Jiang, P. Di Franco, and A. Astolfi, “Shared control for the kinematic and dynamic models of a mobile robot,” IEEE Transactions on Control Systems Technology, vol. 24, no. 6, pp. 2112–2124, 2016.